1 고도화 장비
1) 센서류
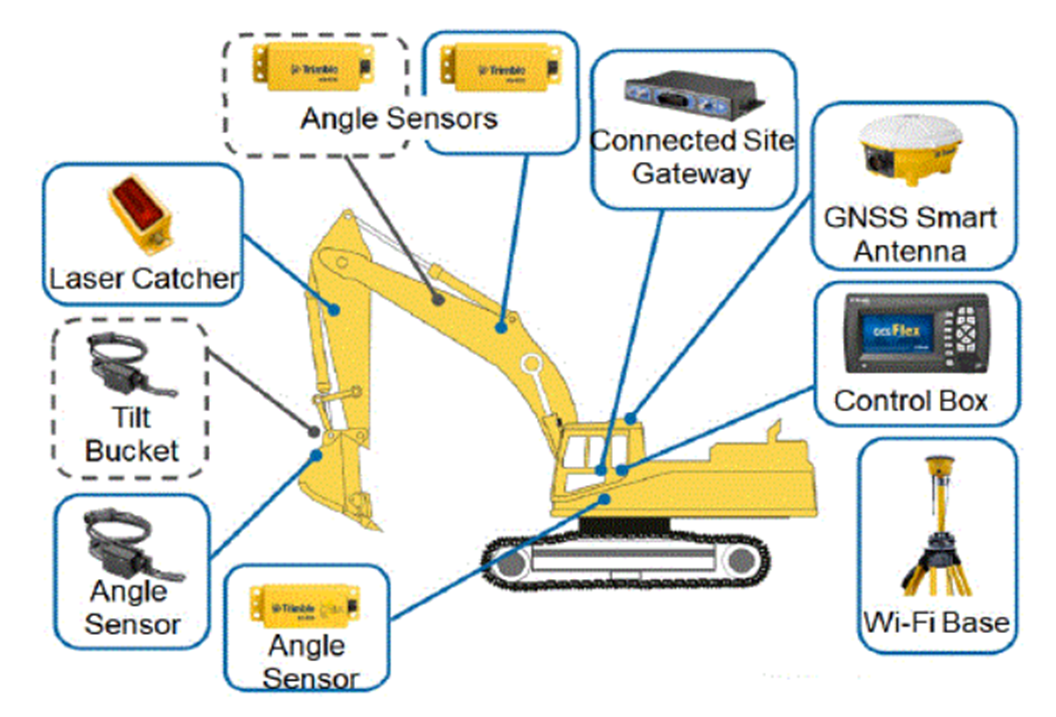
- 각도센서 : 굴삭기의 붐 또는 암과 같이 요동 회전운동을 하는 기계 부품의 각도 위치를 감지하는 센서로서 선형 위치 감지 및 높이 감지에 쉽게 적용한다.
- IMU(Inertial Measurement Unit) 센서: 정밀한 작업 장비 자세를 계산하기 위하여 상부체의 프레임에 장착하며 상부체의 자세 각도를 검출하는 센서이다.
- 실린더 변위센서 : 유압 실린더(붐 실린더, 암 실린더, 버켓 실린더)에 장착되며 실린더의 변위와 속도를 정확하게 감지. 특히 실린더 로드의 압축에 의한 롤러의 미끄러짐에 의한 에러를 보정하는 기능이 있다.
- 회전센서: 회전센서는 굴삭기 상부체의 완전 선회를 감지하는 센서로서 대개 기어 치형 센서로 구성되며 일반적으로 홀 효과 기술, 자기픽업센서에 기반한다.
2) 제어기
- 제어기 : GNSS 수신기로 측정한 건설기계의 절대 위치를 관리하고 건설기계 구동을 제어한다.
3) 측위모듈
- 측위기지국 : Wi-Fi, 인터넷 등 다양한 통신매체를 이용하는 지원 기지국 역할을 하며 정밀좌표 감지를 위한 위치를 보정하는데 이용한다.
- GNSS 수신기 : 위성항법시스템에서 발신한 전파를 이용하여 위치, 고도, 속도, 시간 정보를 수신하는 안테나이다. 한 개의 GNSS 안테나를 이용하여 건설기계의 위치좌표를 감지하거나 두 개의 GNSS 안테나를 운용하여 건설기계의 위치와 회전을 감지한다.
* 미국의 GPS (Global Positioning System)
* 러시아의 GLONASS (Global Orbiting Navigation Satellite System)
* 유럽의 Galileo
* 중국의 Beidou
* 일본의 QZSS (Quasi-Zenith Satellite System)
* 인도의 IRNSS (Indian Regional Navigation Satellite System)

2 응용사례
1) Komatsu의 굴삭기 3D 가이던스 시스템
- 설계 및 버켓 위치의 차이를 확인하면서 작업이 가능하다.
- GNSS를 통해 얻은 위치 정보와 3차원 설계 데이터를 융합한 버켓 끝부분을 실시간으로 모니터링이 가능하다.
- 모니터의 표시에 따라 작업 시 작어의 정밀도를 얻을 수 있다.
- 고정밀화, 고효율화로 작업자의 부담이 감소된다.

2) 기타 사례

참고논문 : 차세대 건설기계 센서시스템에 대한 고찰A Review on the Sensor System of the Next Generation Construction Machinery 최성웅.김용석.양순용Seong Woong Choi, Yong Suk Kim and Soon Yong Yang
'공학트렌드' 카테고리의 다른 글
| 로터세일과 매그너스효과 (0) | 2023.08.30 |
|---|---|
| 수소의 생산(수전해법) (0) | 2023.08.14 |
| 스마트팩토리 (0) | 2023.04.01 |
| 무인탈것(무인차량) 개발 현황(Intelligence vehicle) (0) | 2023.03.25 |
| 이산화탄소포집(carbon dioxide capture and storage CCS) (0) | 2023.03.18 |

